こちらの研究テーマは主に水野研究室で実施しています
These research topics are mainly conducted in Mizuno Laboratory
地表の約7割を覆う海や川,湖沼などの「水圏」と「人間」が相互に及ぼし合う影響の把握を目的として,陸上で生活を営む我々が普段取得し難い水圏情報を効率的,定量的に得るための新しい水圏環境計測技術を開発しています.生物多様性の維持,海洋資源利用に向けたアセスメント,地球温暖化の抑制など,環境保全,修復,改変を目的とした様々なデータを取得します.主に,超音波や光などによる物理的な計測方法を用いています.ここで取得するデータは,現状把握に用いるだけでなく、研究室で開発している生態系モデルへの入力パラメータや開発しているモデルの妥当性の検証などにも利用します.尚,本研究室は,ソーナー(※)を新規に開発している国内有数の研究室です.
※ソーナー(SONAR: Sound navigation and ranging)は水中を伝搬する音波を用いて,物体を探索,探知,測距する装置です.水中音響技術は,光が届きにくい水中において必要不可欠な技術であり,各種超音波利用技術の原点ともいわれています.
海中環境モニタリング技術の開発
分解能3mmの高分解能音響ビデオカメラ(図2-1)を用いて,海中環境を可視化し,モニタリングするための観測システムや音響画像・信号処理の開発を進めています.

図2-1 音響ビデオカメラDIDSON (Sound Metrics)
このソーナーを応用して,自動で魚の分類をするシステム(図2-2)や藻場の分布を定量化する技術(図2-3),底生動物の行動解析技術(図2-4)などの開発を進めています.
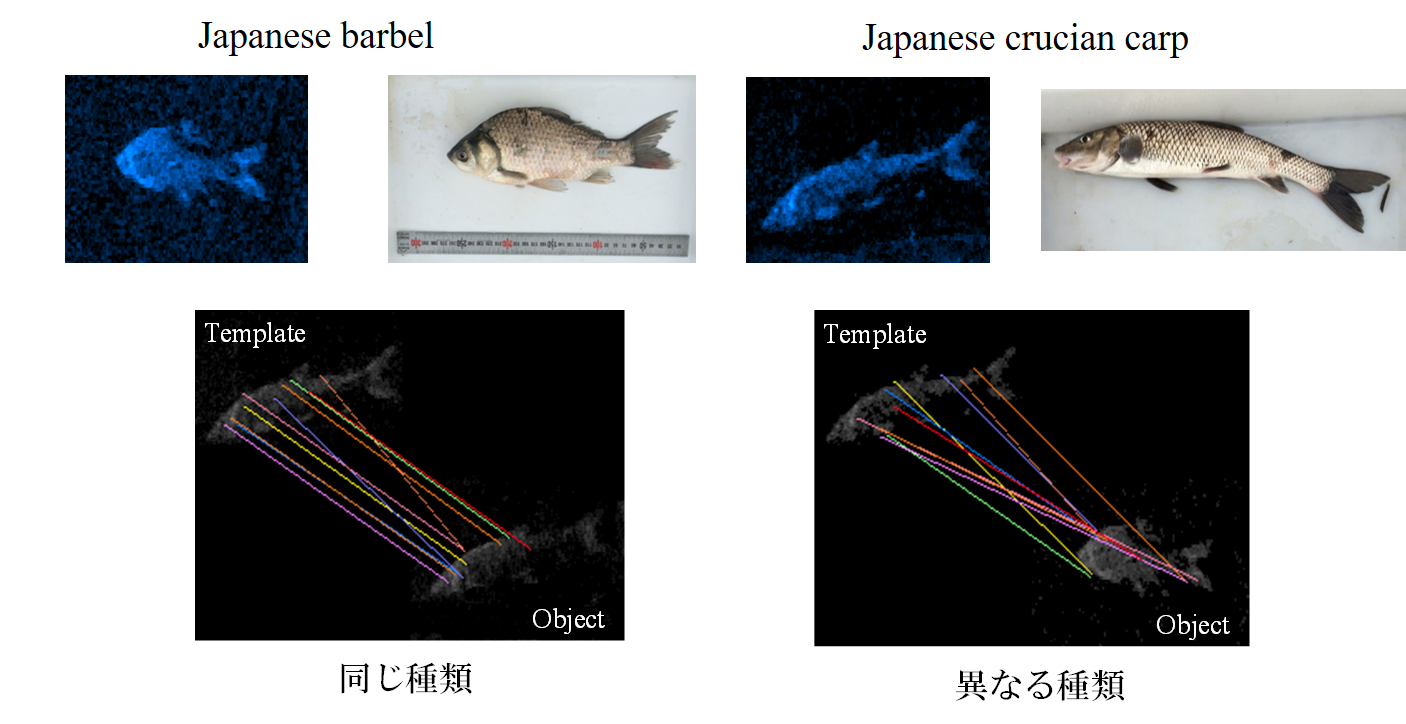
図2-2 魚の分類
(研究協力:宮城県伊豆沼・内沼環境保全財団)
Ref) Y. Zhang, K. Mizuno, A. Asada, J. Ashizawa, Y. Fujimoto, T. Shimada, New method of fish classification by using high-resolution acoustic video camera-ARIS and local invariant feature descriptor, Proceedings of OCEANS’16 MTS/IEEE, Monterey, in press
図2-3 海草分布
(研究協力:東ダバオ州科学技術大学)
図2-4 ザリガニの自動追跡
Ref) K. Mizuno, K. Abukawa, T. Kashima, A. Asada, Y. Fujimoto, and T. Shimada “Assessing the biological process of Hydrilla verticillata predation in a eutrophic pond using high-resolution acoustic imaging sonar” Limnology, 17(1), pp. 13-21, 2016
海底下環境モニタリング技術の開発
近年,海中や海底だけでなく,海底下の環境にも注目が集まっています.例えば,我々にもなじみ深い二枚貝のあさりは重要な水産資源であることに加え,水質浄化作用を有することから極めて大切な生物ですが,近年,その漁獲量は減少を続けており,その原因解明や対策が必要です.しかしながら,海底下の情報を取得するのは容易ではなく,その分布範囲や生態は未だ不明な点が多いとされています.本研究室では,図2-5に示すようなコンセプトの新しい計測システムを開発しています.

図2-5 観測イメージ
しかしながら,海底下の堆積層は固体と液体から構成される複合材料であるため,音波伝搬は極めて複雑になります(図2-6).この複雑な音波伝搬現象を理論的,実験的に理解しながら,システム設計技術や信号処理技術の高度化を進め,各種計測システムを世の中に送り出しています(図2-7,8,9,10,11,12).
図2-6 堆積層内の音波伝搬(FDTD法により計算)

図2-7 有限振幅音波の非線形性を利用したパラメトリックサブボトムプロファイラー
(ロボットは海上技術安全研究所が開発)
Ref) K. Mizuno, A. Asada, Y. Saito, F. Katase, K. Kim, K. Tamura, T. Ura, Y. Nishikawa, “Development and sea trial of the Parametric Sub-Bottom Profiler system for Autonomous Underwater Vehicles –off Hatsushima Island- “Proceedings of OCEANS’17 MTS/IEEE, Aberdeen, in press
K. Mizuno, Y. Saito, F. Katase, K. Nagahashi, A. Asada, “Development of the Parametric Sub-Bottom Profiler for Autonomous Underwater Vehicles -Prediction of the reflection level using Sonar equation based on TBE and Biot-Stoll model-“, Proceedings of Underwater Technology 2017, Korea, in press
K. Mizuno, A. Asada, F. Katase, K. Nagahashi, T. Ura, T. Haraguchi, “Development of the Parametric Sub-Bottom Profiler for Autonomous Underwater Vehicles and the Application of Continuous Wavelet Transform for Sediment Layer Detections” J. Marine Acoust. Soc. Jpn., vol. 43, no. 4, pp. 233-248, 2016

図2-8 3次元音響コアリングシステム
(開発協力:アーク・ジオ・サポート社、特許第6337311号)
Ref) K. Mizuno, X. Liu, F. Katase, A. Asada, M. Murakoshi, Y. Yagita, Y. Fujimoto, T. Shimada, and Y. Watanabe “Automatic non-destructive three-dimensional acoustic coring system for in situ detection of aquatic plant root under the water bottom” Case Studies in Nondestructive Testing and Evaluation, vol. 5, pp. 1-8, DOI information: 10.1016/j.csndt.2016.01.001, 2016
図2-9 堆積層内の3次元音響画像
図2-10 埋没しているアサリ
Ref) H. Suganuma, K. Mizuno, A. Asada, “Application of wavelet shrinkage to acoustic imaging of buried asari clam by using high-frequency ultrasound”, Japanese Journal of Applied Physics, vol. 57, 07LG08, 2018
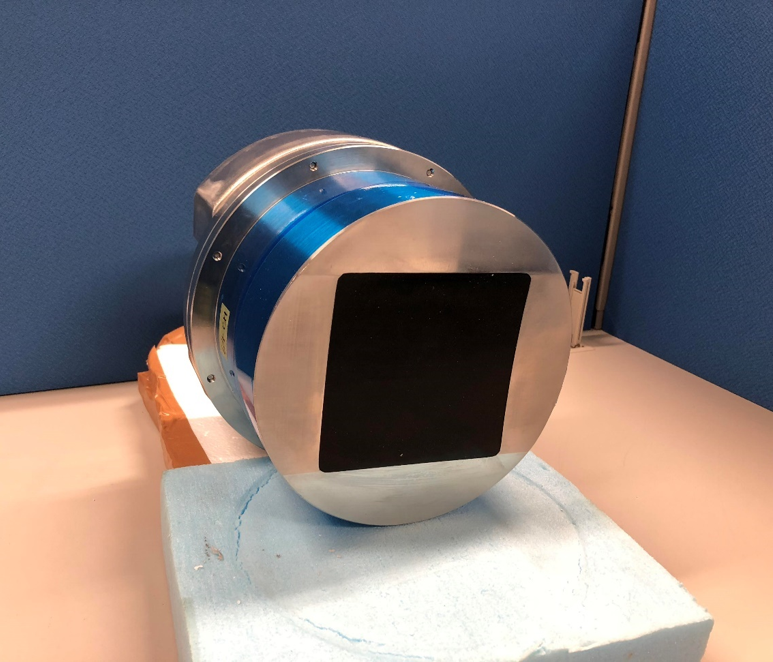
図2-11 堆積層内精密探査アレイソーナー
(開発協力:ジャパンプローブ社)

図2-12 音響モグラ
海底環境モニタリング技術の開発
Google Earthに代表されるように衛星測量技術の進歩によって,陸上のあらゆる地理情報は容易に取得できるようになりましたが,海中では電波が著しく減衰するため,海底の情報取得についてはまだまだ十分とは言えません.しかし,近年の画像処理技術の発達により,海底の情報も高い精度で取得が可能となってきました.本研究室では,それら画像処理技術を応用することで,海底環境を効率よく可視化,定量化するための計測手法や新しい計測システムの開発を進めています(図2-12,13,14).
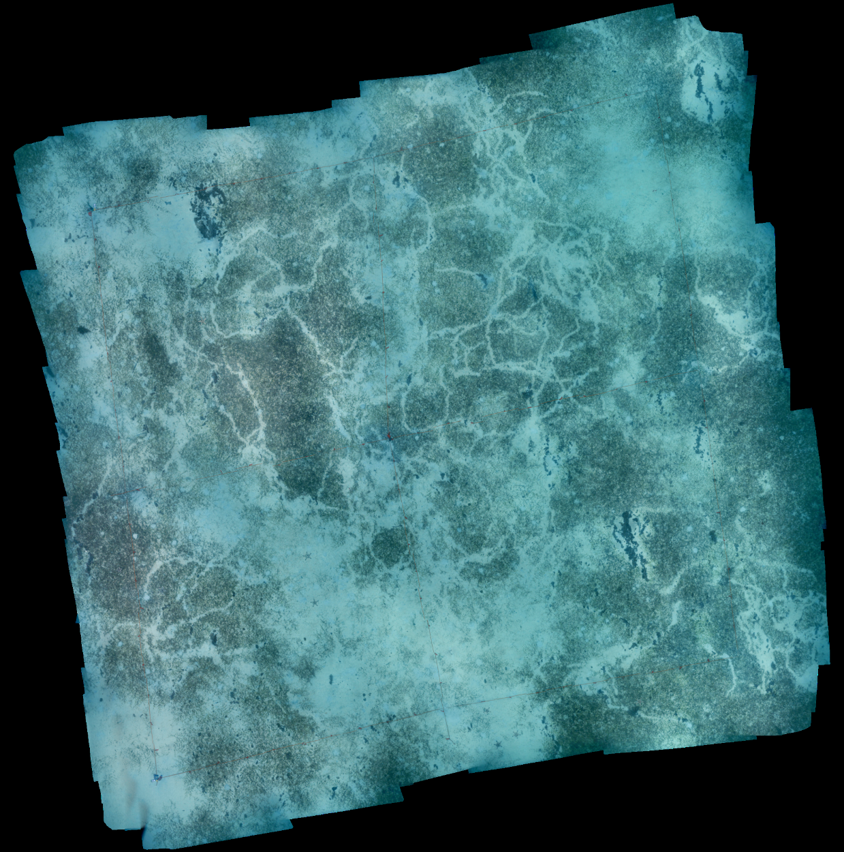
図2-12 藻場とジュゴンの食み跡マップ
Ref) K. Mizuno, A. Asada, Y. Matsumoto, K. Sugimoto, T. Fujii, M. Yamamuro, M. D. Fortes, M. Sarceda, L. A. Jimenez, “A simple and efficient method for making a high-resolution seagrass map and quantification of dugong feeding trail distribution: a field test at Mayo Bay, Philippines.”Ecological Informatics, vol. 38, pp. 89-94, 2017

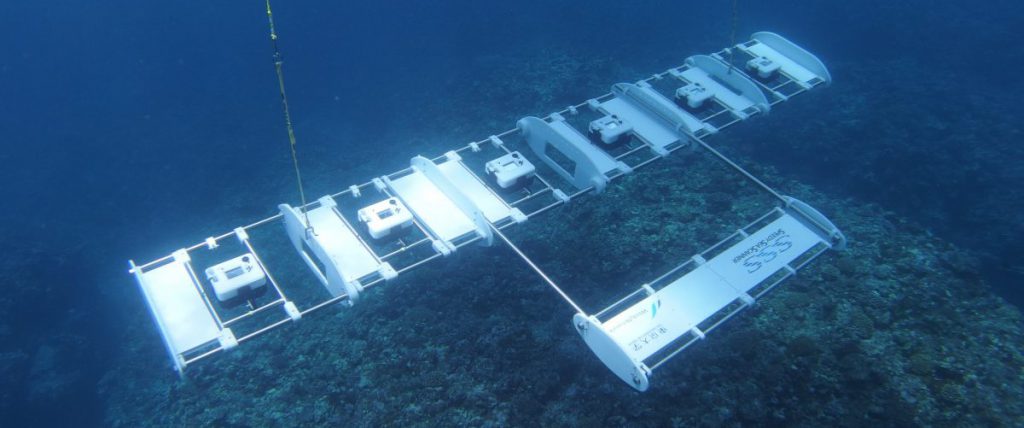
図2-13 Speedy Sea Scanner(開発協力:ウインディネットワーク社 特許出願)を用いた観測の様子

図2-14 Speedy Sea Scannerを用いて作成した精密海底マップ
(研究協力:九十九島水族館)
Ref) 1. K. Mizuno, K. Terayama, S. Tabeta, S. Sakamoto, Y. Matsumoro, Y. Sugimoto, T. Ogawa, K.Sugimoto, H. Fukami, M. Sakagami, M. Deki, and A. Kawakubo, “Development of an efficient coral-coverage estimation method using a towed optical camera array system (SSS: Speedy Sea Scanner) and deep-learning-based segmentation: A sea trial at the Kujuku-shima islands.”, IEEE journal of Oceanic Engineering, DOI: 10.1109/JOE.2019.2938717